Assembly101: A Large-Scale Multi-View Video Dataset for Understanding Procedural Activities
News
Abstract
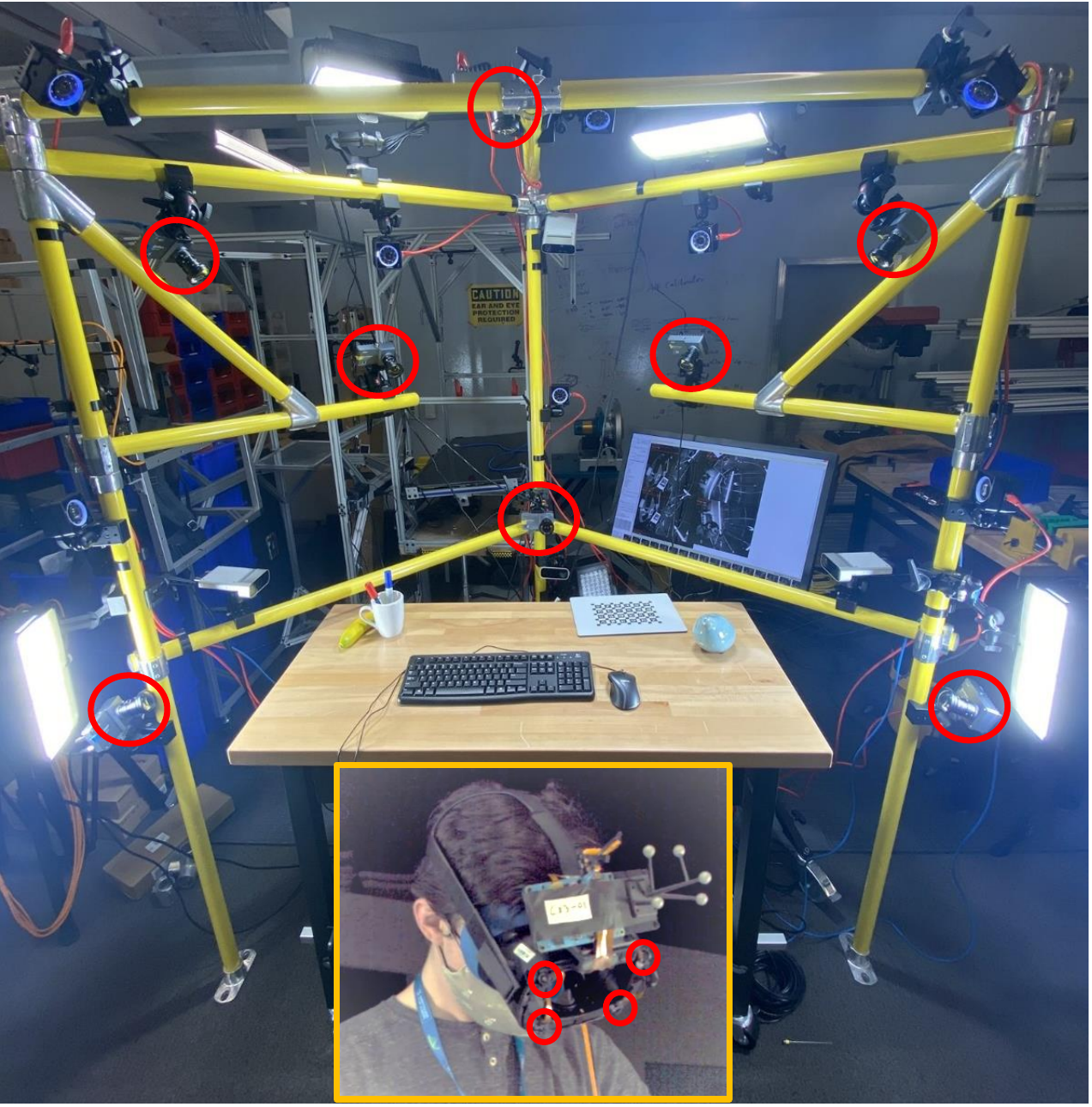
Assembly101 is a new procedural activity dataset featuring 4321 videos of people assembling and disassembling 101 "take-apart" toy vehicles. Participants work without fixed instructions, and the sequences feature rich and natural variations in action ordering, mistakes, and corrections. Assembly101 is the first multi-view action dataset, with simultaneous static (8) and egocentric (4) recordings. Sequences are annotated with more than 100K coarse and 1M fine-grained action segments, and 18M 3D hand poses. We benchmark on three action understanding tasks: recognition, anticipation and temporal segmentation. Additionally, we propose a novel task of detecting mistakes. The unique recording format and rich set of annotations allow us to investigate generalization to new toys, cross-view transfer, long-tailed distributions, and pose vs. appearance. We envision that Assembly101 will serve as a new challenge to investigate various activity understanding problems.
Paper
Assembly101: A Large-Scale Multi-View Video Dataset for Understanding Procedural Activities
Fadime Sener, Dibyadip Chatterjee, Daniel Shelepov, Kun He, Dipika Singhania, Robert Wang, Angela Yao
Please send feedback and questions to 3dassembly101<at>gmail.com
License

Assembly101 is licensed by us under a Creative Commons Attribution-NonCommercial 4.0 International License. The terms of this license are:
Attribution : You must give appropriate credit, provide a link to the license, and indicate if changes were made. You may do so in any reasonable manner, but not in any way that suggests the licensor endorses you or your use.
NonCommercial : You may not use the material for commercial purposes.
Citation
@article{sener2022assembly101,
title = {Assembly101: A Large-Scale Multi-View Video Dataset for Understanding Procedural Activities},
author = {F. Sener and D. Chatterjee and D. Shelepov and K. He and D. Singhania and R. Wang and A. Yao},
journal = {CVPR 2022},
}